
OpenCV入门(十)——图像分割技术
- 2022-09-29 13:49:00
- aiadmin 原创
- 2373
FloodFill泛洪填充算法是正在良众图形绘制软件中常用的填充算法通俗来说是主动选中与种子像素联系的区域使用指定的颜色实行区域颜色更换可用于标识或涣散图形的某些局限。例如windows编制中的图像编辑软件中的油漆桶这一效力或者是Photoshop的魔术棒采取器械都是通过FloorFill泛洪填充来刷新和延迟的。
从一个点发端遍历邻近的像素点填充成新的颜色直到封锁区域内的全盘像素点都被填充成新颜色为止。
用指定颜色填充一个连通域。高位比特位能够采取0或下面的开闭选项的组合若是扶植CV_FLOODFILL_FIXED_RANGE为目今选项则商讨目今像素与种子像素的差不然商讨目今像素与其相邻像素的差。若是扶植CV_FLOODFILL_MASK_ONLY为目今选项函数不填充原始图像但填充掩模图像这种处境下MASK务必黑白空的。
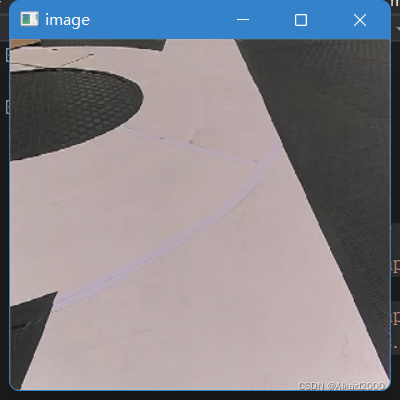
FloodFill区域填充合用于对内界说区域的种子实行填充区域内部全盘像素具有联合的颜色或亮度外部区域外的全盘像素值阐扬出分歧的特质。使用FloodFill可将该区域中的全盘像素都扶植为其它一个新值并通过特定例矩来告竣区域内点中的连通域从而告竣对相像区域实行填充直到找到区域内全盘像素或范围轮廓。
那么咱们能够通过告竣一个点击一个点剖断邻域的特质值实行填充就像油漆桶的操作
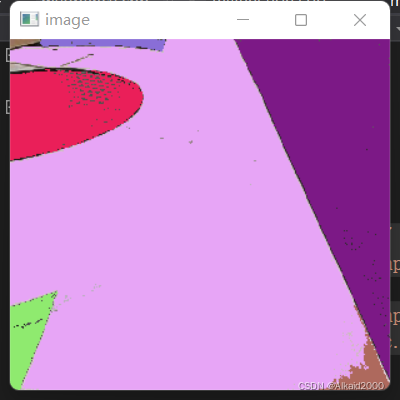
均值漂移是一种核密度忖度举措用来理会杂乱众模特质空间。性子本来便是使用了梯度低落法沿着梯度低落举措寻找倾向函数的极值。图像瓜分是找到瓜分像素点所属类的核心均值漂移以为类核心是概率密度的极大值点对付任一像素沿着梯度偏向总能找到其极值点。本来这个身手也正在神经搜集中使用正在络续的梯度低落中找到适应的权重。
1滑腻mask点搜罗。图像由N维像素组成特质空间特质空间由坐标空间与颜色空间组成空间域或颜色域组成相应的笼络域。
那么对付图像中的像素点它正在笼络特质空间中迭代搜罗相应的mask点扶植源图像的像素用xi呈现滑腻后的图像用zi呈现滑腻是将模点的颜色值初始化为原始像素点使用空间颜色域特质函数yik1取得滑腻后的像素值
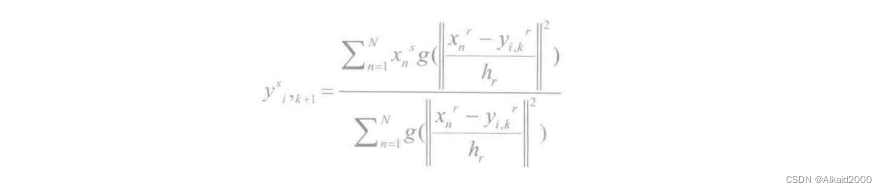
那么个中g为核函数hr为颜色空间的核滑腻标准xn为特质函数的空间分散。对付每一个像素点x咱们筹算其y然后正在坐标空间行家使方形区域筛选切近yik的数据点然后对取得的数据点筹算其重心挪动yik1接着剖断取得的点集是否满意终止条款结果将取得mask点的颜色更新xiyi,c。
2mask点聚类。对滑腻后的图像行使颜色相像度与空间位子相像性实行剖断正在实践筹算中不时只商讨颜色相像性对满意zi-zjhs的点集实行兼并。
3兼并相像小区域。将上一步取得的模点集消逝像素个数小于S的区域或与它相像的区域实行兼并。
起首咱们以随机采纳的点为圆心r为半径做一个圆形的滑窗其倾向是找到数据核心密度最高处然后将其行动核心。
毗连挪动直到任何偏向的挪动都不行加众滑窗中点的数目此时的滑窗收敛。
将上述设施正在众个滑窗长进行以掩盖全盘的点当众个滑窗收敛重叠时其原委的点将会通过其滑窗聚类为一个类。
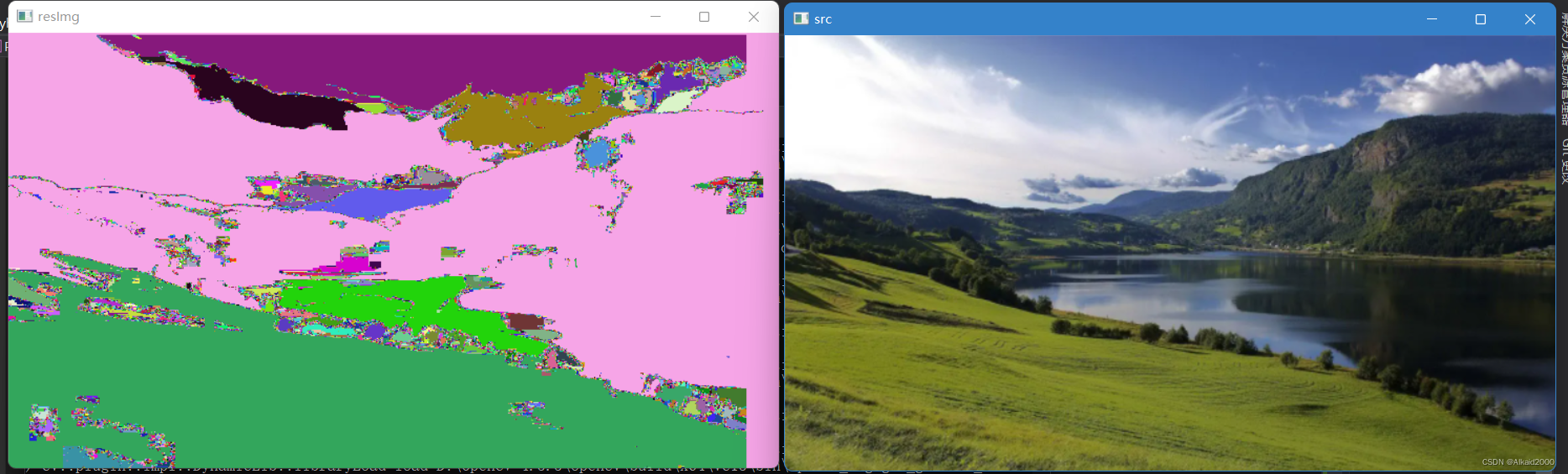
个中(R,G,B)与(r,g,b)永诀是颜色空间(X,Y)、x,y的构成局限通过筹算邻域的均匀空间值和均匀颜色向量它们将行动下一次迭代的邻域核心迭代停止后每次迭代核心像素的颜色分量值将设量位下一次迭代核心的结果值均匀颜色分量当maxlevel0时创修maxlevel1层高斯金字塔实行上面得迭代流程结果被转达到更大的层和迭代只运转这些像素的层从而告竣颜色分歧层是从较低的区分率层的锥体发端的使颜色区域的范围清楚。
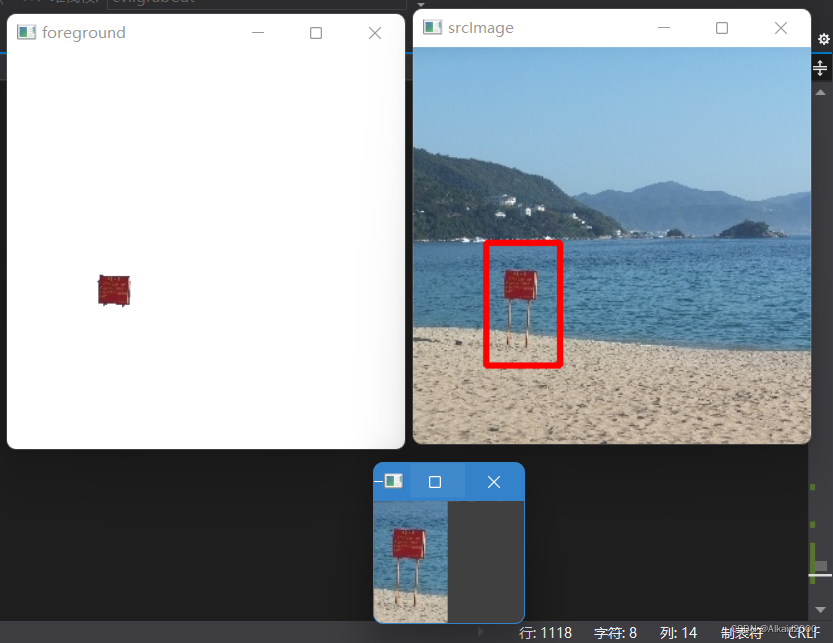
Graphcut是一种基于图论的瓜分举措。基于图论的瓜分身手是图像瓜分规模中新的切磋热门该举措基于才干优化算法将图像瓜分题目转换为图的最小割优化题目。Grabcut是Graphcut算法的刷新Graphcut是一种直接基于图切算法的图像瓜分身手仅仅必要确认前景与后台输入该算法就能够完毕后台与前景相像督导额赋权图并通过最优切割来告竣图像瓜分。Grabcu算法不必要用户交互仅仅必要输入包括倾向前景的区域就能够完毕前景与后台的涣散。
Graphcut的倾向和后台模子是灰度直方图Grabcut采用的是RGB三通道羼杂高斯模子。
Graphcut的能量最小化瓜分是通过一次筹算完毕的可是Grabcut是依照瓜分模子参数更新完毕的练习流程。
Graphcut必要用户输入前景与后台区域点集而Grabcut只必要供应含有后台的区域像素集就能够完毕瓜分。
奥妙区域通俗指的是与边际邻域有着某些特质颜色或灰度分歧的区域。奥妙区域相对付点区域检测更安闲正在倾向瓜分及检测、图像配准、特质理会等规模取得了广大的行使。常睹的奥妙区域如医学规模的X光照片或CT某些特定机闭、天空下降物等。
筹算机视觉中咱们不时闭属目标的特质是颜色和灰度描绘图像中两个区域的视觉相像性有很众举措如体式形容子、颜色特质、距特质等。若是对付某种具有特有纹理的图片咱们能够利用纹理形容。对付颜色分歧的区域咱们能够利用颜色特质来衡量对象的分歧局限的相像性。
常用的外达颜色扩散的举措是利用前文讲述的直方图操作使用颜色空间外达RGB颜色空间直方图不行很好的呈现颜色扩散征象因而使用HSV色调饱和度纯度来筹算相应其直方图新闻。
正在筹算机视觉中奥妙区域检测闭键是通过微分检测或部分极值的分水岭算法告竣的。基于图像中的奥妙区域的邻域像素值或大或小的特质咱们能够通过筹算图像中的部分极值点来告竣相应趣味区域的检测。
拉普拉斯算子是检测图像的奥妙区域常用的举措二维高斯原委拉普拉斯变换后取得的

拉普拉斯检测到图像中的部分极值点通俗必要先对图像实行低通滤波去除伪点噪声。拉普拉斯相应正在标准σr/√2时赢得极值也便是说满意特质空间和标准上的极值点便是必要检测的奥妙区域。
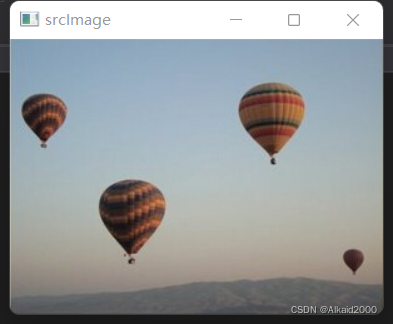
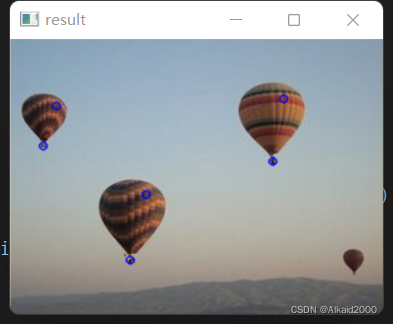
部分机制的分水岭检测奥妙区域时对源图像实行众间隔区域二值化操作对一个二值化图像提取相应的连通域并筹算相应区域的连通核心点依照核心点拟合归类成统一块group取得对应的blob特质结果依照的取得的核心点集group忖度出blob特质和对应半径。
OpenCV中SimpleBlobDetector提取blobs倾向是先将输入图像源转化为二值图像以thresholdStep为参数间隔使用二值化区间阈值区间[minThreshold,maxThreshold]实行众次二值操作。然后提取每个二值化图像的区域连通并筹算它们的核心。接着依照minDistBetweenBlobs将上一设施取得的区域核心归类取得group。结果依照group忖度取得每个blob的核心及其半径并返回相应的闭头点位子及尺寸。
肤色检测身手常用的举措有基于颜色空间、光谱特质及肤色反射模子等举措这些举措的闭键设施都是进步行颜色空间变换然后再创修肤色模子。肤色检测中颜色空间有RGB、YCrCb、HSV和Lab等通俗再处分的期间是将RGB颜色空间变换成相应的颜色空间对某品种型的图像通过统计或物理理会转换成YUV、LUX或H-SV-V等肤色正在颜色空间的分散中相对齐集为了消逝光照的影响日常放弃亮度通道。
皮肤模子中有单高斯、羼杂高斯、贝叶斯模子和椭圆模子等高斯分散模子哟闭于描绘椭圆高斯概率对肤色与非肤色采用高斯羼杂模子正在特定区域内能赢得较好的实习成效。
那么咱们常用哪种颜色模子检测肤色常用的是YCbCr个中Y代外的是亮度Cr代外的是光源中的血色分量Cb代外光源中的蓝色分量。人的肤色正在外观上的分歧是由色度惹起的分歧人的肤色分散齐集正在较小的区域内。
肤色的YCbCr颜色空间CbCr平面分散正在近似的椭圆区域内就能够很容易地确认目今像素点是否属于肤色。将图像转化到YCbCr空间而且正在CbCr平面实行投影能够采撷到肤色地样本点将其投影到此平面后咱们实行相应地非线;K-L变换进而变成的统计椭圆模子如下


将CbCr平面均分为很众小区域将每个区域的核心点CbCr色度值行动目今区域的特质值对肤色区域像素值实行遍历若是目今像素值落正在该区域内更换目今区域特质值。
| 联系人: | 王先生 |
|---|---|
| 电话: | 15640228768 |
| 微信: | 1735252255 |
| 地址: | 沈阳市铁西区兴华南街58-6号 |
-
思陌产品
深度学习系统产品介绍 -
使用帮助
使用手册 -
关于我们
公司简介 -
资讯反馈
交流论坛 -
联系我们
Tel 15640228768 QQ/WX技术支持 1735252255
