
微美全息(WIMIUS)开发基于图像和点云融合的三维目标检测算法系统
- 2023-11-22 13:23:00
- aiadmin 原创
- 1390
近年来,跟着大界限磨练数据和前辈呆板进修、深度进修算法的发扬,三维主意检测的集体本能有了宏大的升高,三维主意检测也普遍运用于重修修筑物的修筑模子、自愿驾驶、人脸检测、史册遗址保存、虚拟实际逛戏等行业。
三维主意检测的数据显露方式有众种,比如RGB图像、立体像素化图像、众边形网格以及点云等。跟着硬件设置本能的提拔与人工智能技能的飞速发扬,越来越众的界限开头运用激光雷达搜集到的点云实行三维空间的场景剖释,如自愿驾驶、巩固实际等,雷达点云不易受到外界成分的影响,具有较强的抗搅扰材干且测距精度较高。而相机搜集到的RGB图像却具有充分的纹理消息和充分的颜色,可是图像是缺乏深度的二维消息,存正在由远及近的标准题目,可能看出图像数据与点云数据各有优劣。
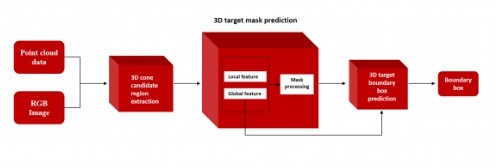
WIMI微美全息(NASDAQ:WIMI)开拓了基于图像和点云调和的三维主意检测算法编制。以RGB 图像和含深度消息的点云数据为输入数据,对三维空间中的主意实行分类和定位,再通过一系列的特点提取、实例豆割、3D框猜想等操作,将图像和点云调和,操纵众职分的互相增益,,大大提拔三维主意检测无误率。
起首处分图像和点云数据,提取各自的特点,将特点输入到检测手腕的差别阶段以实行3D畛域框预测,提取出对应的主意数据。每个物体对应一个视锥体点云;其次,将每个物体的视锥体点云做为掩膜预测的输入数据,得回预测的物体掩膜,并操纵物体掩膜结果投影至点云空间再造成视锥实行3D实例分与3D框猜想,可有用地减小了场景中嘈杂点云对主意检测的影响。然后将结尾层的特点维系正在一同送入决议层实行特点调和和主意检测。为了正确地定位物体的3D位子,可能通过将点云数据中的点投影至图像平面来设置点和像素的联系,然后将图像特点调和入每个点中。将图像RGB特点融入点云数据正在必然水准上是不妨起到正向提拔的成就,有用提拔三维主意检测的精度。
跟着三维数据获取技能的前进、揣度材干的巩固、深度进修技能的发扬以及运用需求的增补,三维视觉技能的咨询和运用受到越来越众的眷注。目前,三维主意检测技能一经成为揣度机视觉和自愿驾驶界限的中心技能之一,与二维主意检测技能比拟,正在三维空间中实行主意的位姿猜想关于本质运用场景加倍厉重。三维主意检测与识别是三维场景剖释的环节技能,是呆板剖释寰宇并与寰宇交互的本原,正在自愿驾驶、智能呆板人、聪明交通、自决导航等界限具有极其宽敞的运用前景,WIMI微美全息也将不竭拓展其基于图像和点云调和的三维主意检测算法的使用界限。
| 联系人: | 王先生 |
|---|---|
| 电话: | 15640228768 |
| 微信: | 1735252255 |
| 地址: | 沈阳市铁西区兴华南街58-6号 |
-
思陌产品
深度学习系统产品介绍 -
使用帮助
使用手册 -
关于我们
公司简介 -
资讯反馈
交流论坛 -
联系我们
Tel 15640228768 QQ/WX技术支持 1735252255
